![]()
X-Plor V2 - Vehículo de exploración avanzado.
Despues de la Version 1 del XPLOR, como nos ibamos a conformar con las fucionalidades que tenia, nooooo. Habia que hacer algo mas "apañao". En este caso la mecanica ha salido de dos Bizak Stunt Driver, o como lo llama el fabricante chino TOP NOTCH TOYS LIMITED, el SideWinder Stunt Car , este coche tiene varios aspectos interesantes por lo que he optado por el, neumaticos de goma, no pegados, para poder rellenarlos con gomaespuma, pues de serie son muy blandos y no apoyan bien en el suelo. Ademas tiene un eje con traccion y direccion, cosa realmente interesante, ya que en la version 1, solo se disponia de direccion a un eje y traccion al otro, este aspecto es importante para "desatascar" el coche de sitios pequeños, como entre las patas de una silla. Ademas las ruedas son de mas diametro y esta mas alto del suelo, lo que permite sortear facilmente hasta la alfombra mas alta.
La idea es que meter el PC en el mismo coche, para darle inteligencia y capacidad de proceso de verdad. Un P4-Mobile a 2Ghz se va a encargar de procesar las dos (o mas) señales de video de las camaras (vision stereo) y el correspondiente audio, para sacar mapas y dotarle de capacidades de navegacion (a ver como se nos da), control mecanico, etc... del chasis, todo ello no va a ser enviado de manera "analogica" como en la version 1, esta vez usaremos Wifi, por aquello de la encriptacion WPA, el streaming de las señales via IP, con codificacion por soft en M-JPEG o similar que nos dara buena calidad y una gasto de CPU razonable, sin olvidar que tenemos 54mbps de conexion con la estacion base.
Seguimos usando nuestros amigos los MSP430 de TI, para el control de los servos y motores, la electronica de control, la heredamos del XPLOR V1, sencilla y fiable. La intencion es hacer un sistema de "garaje" del "cachimbo" de manera que entre y salga segun las necesidades de carga que tenga, de modo automatico, usara dos equipos de baterias, el segundo es para emergencias.
Seguimos en la linea de poder controlarlo desde un puesto remoto, solo que esta vez sera mas sencillo el poder usar un simple portatil o PC, con salida de TV (para el video entrelazado de las i-glasses) o desde cualquier ordenador en red o internet.
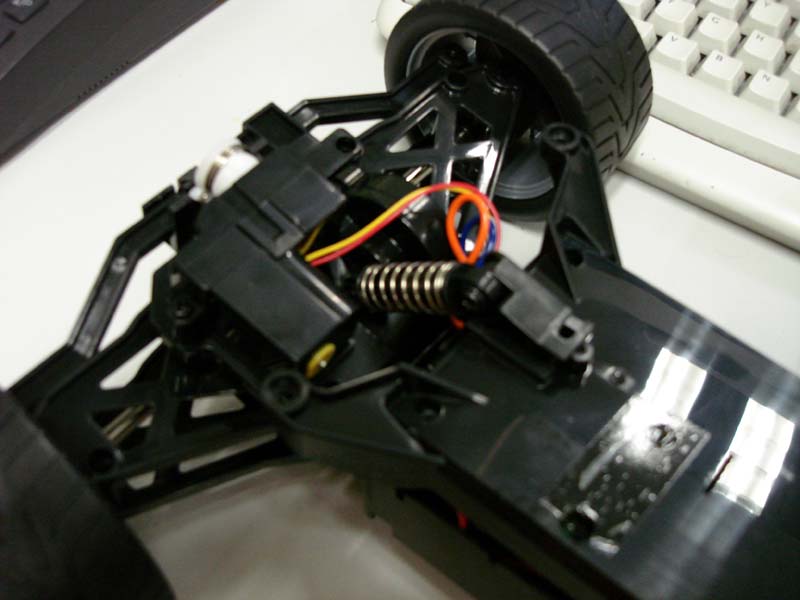
Aqui la vista a medio desmontar, segun venia de origen.

Otra vista, podemos ver el motor que acciona la direccion del eje trasero, que logicamente sera sustituido por un servo de RC tipico.

El eje delantero con suspension independiente es candidato para hacer un "carrito" para llevar cosas, veremos que sale...

Detalle de la pequeña suspension trasera, es mono brazo, pero han dejado cierta holgura en el eje de giro y es razonablemente util.
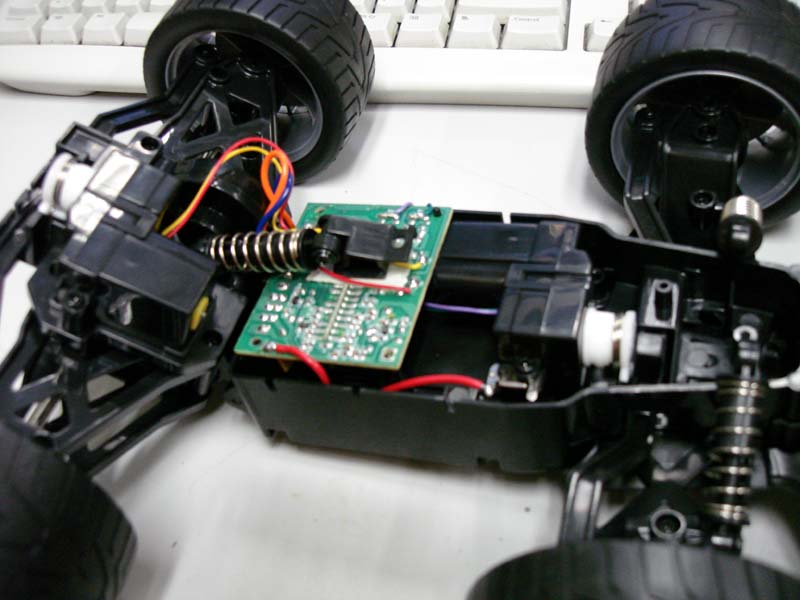
Cuando quitamos la tapa, aparece la electronica de origen. Tambien podemos ver el motor de la direccion del eje delantero.
La idea ha sido cortar los dos chasis a la altura del motor de direccion y unirlar, asi ganar medida para que quepa toda la electronica, placa mini itx, baterias, camaras.... muchas cosas... Como siempre usando mi pegamento preferido el "Plasticos Dificiles" de Ceys, con imprimacion incluida y retales de Polietileno, del amigo Luis.
Aqui el aspecto de como va quedando la union de las dos mitades de los chasis con el primer eje de traccion-direccion.

En esta podemos ver, como quedan los dos ejes montados con las tapas en las que se fijan los amortiguadores.

Primer ensayo de "tamaños" la placa mini itx, es grande, 17x17cm, hay que meterla por algun lado.
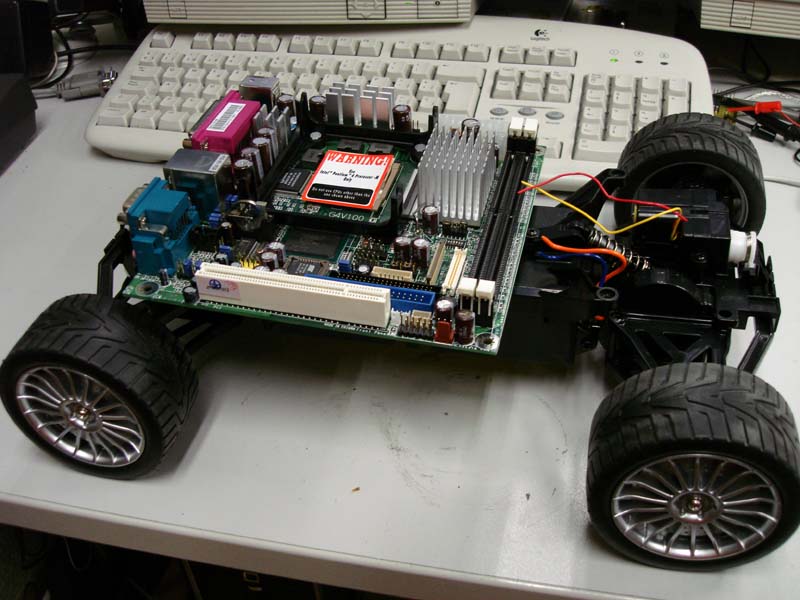
Aqui vemos la proporcion de chasis y placa, no va a ser facil meter tasntas cosas en este chasis, veremos que tal el ingenio.

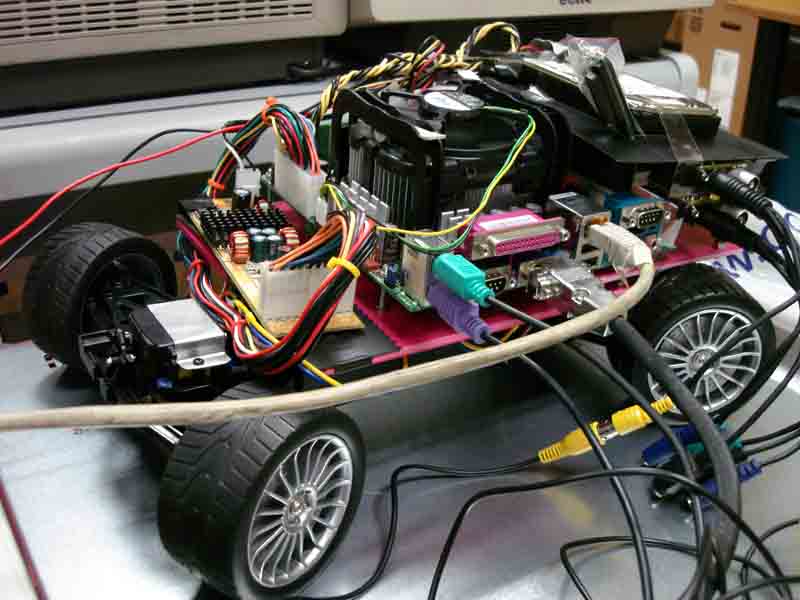
Primera vista del "cachimbo" encendido, con XP, como no y.... un poco de cinta adhesiva, ;-D

Otra vista fronta, en este momento todo estaba sobre puesto, simplemente se pretendia probar pesos, dimensiones, consumos, formas de conectar todo entre si, y... como era de esperar, la suspension era blanda, y mil problemas mas.... no problem!
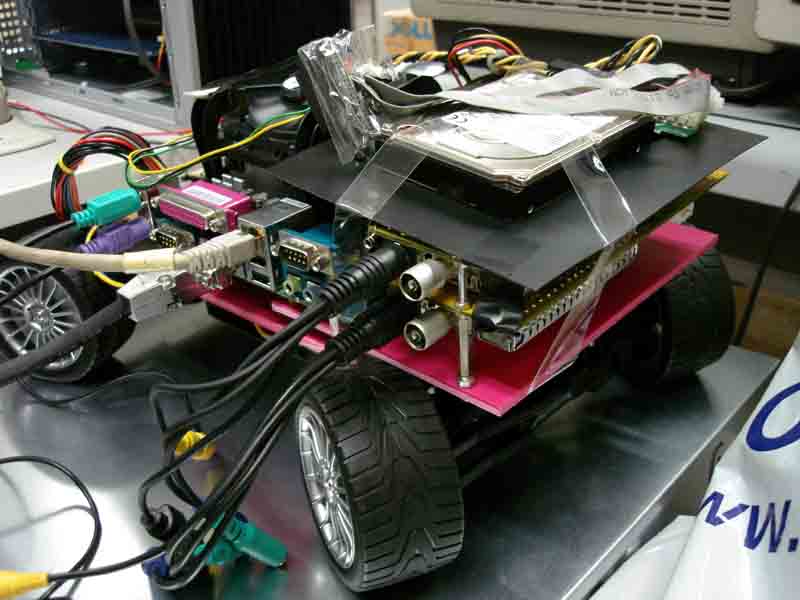
Aqui la estupenda sujeccion de la parte mas sensible, el disco duro, .... nada que el "celo" no sujete... Ademas podemos ver lo aparatosas que llegan a ser las dos capturadoras, tendre que eliminar los conectores externos.
Comienza la era de la "energia", 6000mah a 12v, parece que el P4-M no consume mucho, pero si que llega a 3A en total.

Aqui la ubicacion definitiva del disco duro, 3Gb, lo justo, el XP, el Remote Admin y el Delphi....juuuuusto...

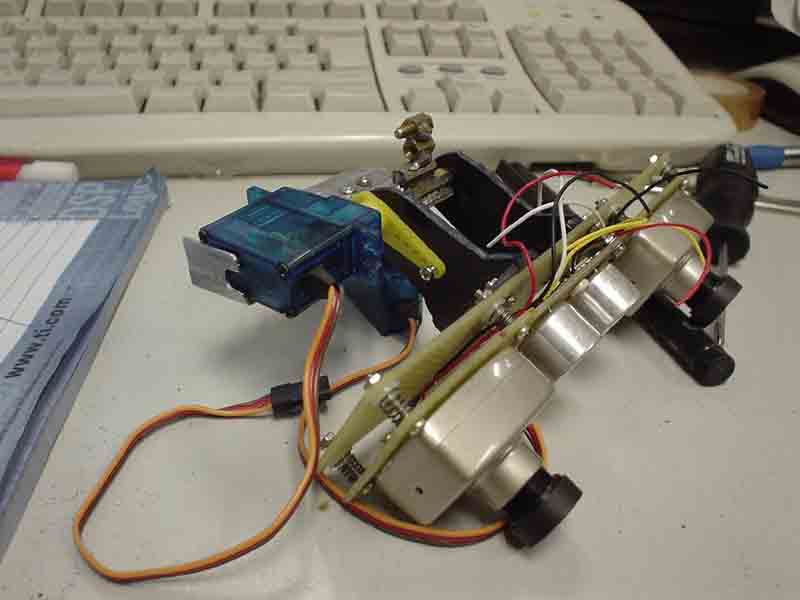
Empezamos la estructura de las camaras, de momento en plan rapido, para hacer pruebas, mas adelante otra mecanica mas fina, en este caso uso un "sonar" de ultrasonidos, para medir la distancia al objeto que miro, y asi, poder ajustar la geometria de las camaras simulando el giro natural de los ojos.
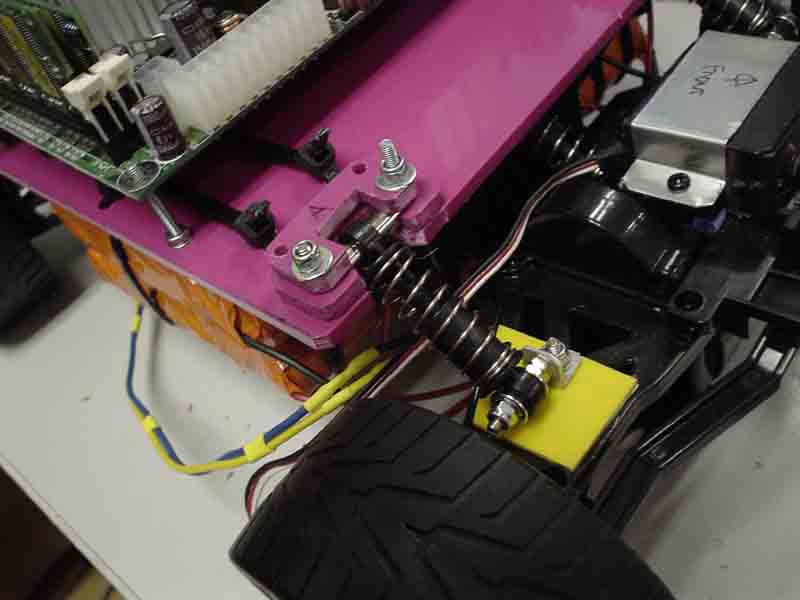
Mejorando la suspension, tres amortiguadores por eje.

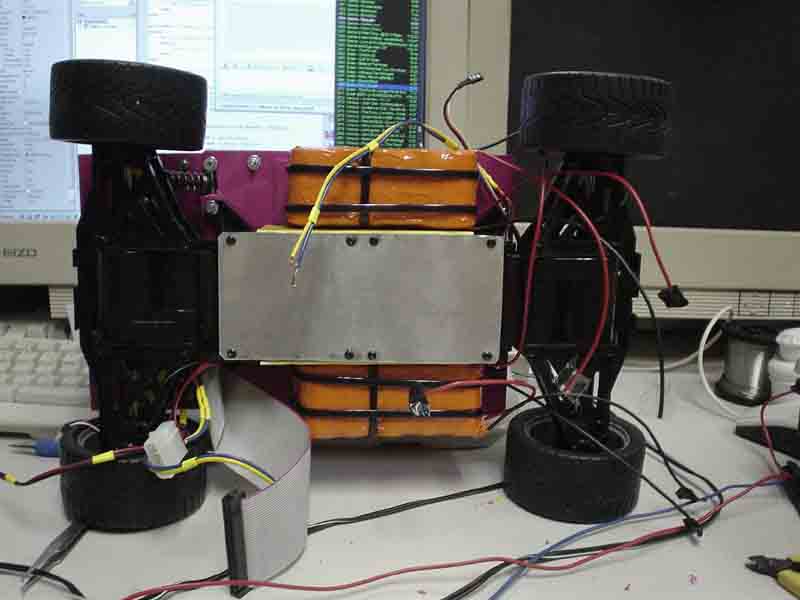
Vista inferiorm las baterias principales (en naranja) ya estan alojadas, las auxiliares estan bajo la chapa de aluminio.
Vista con la placa, a medio fijar.

Detalle de la suspension delantera.
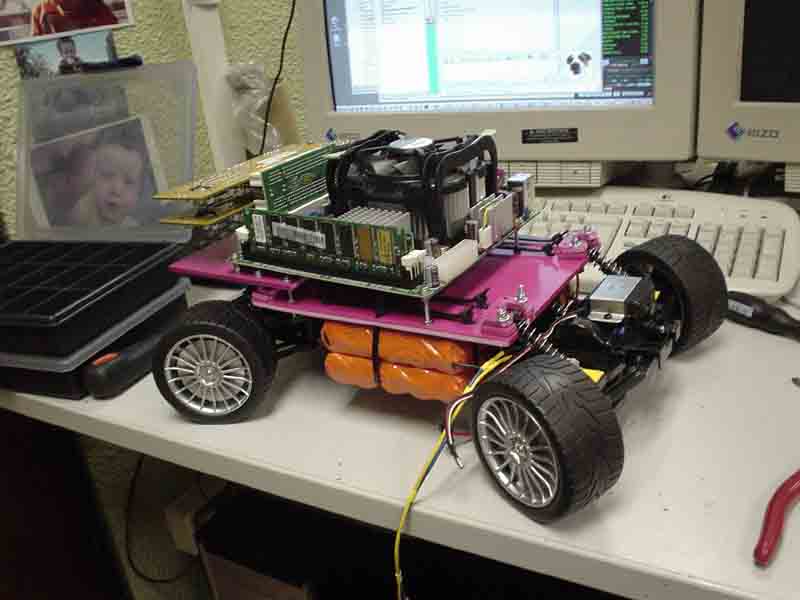
Vista del XPLOR.
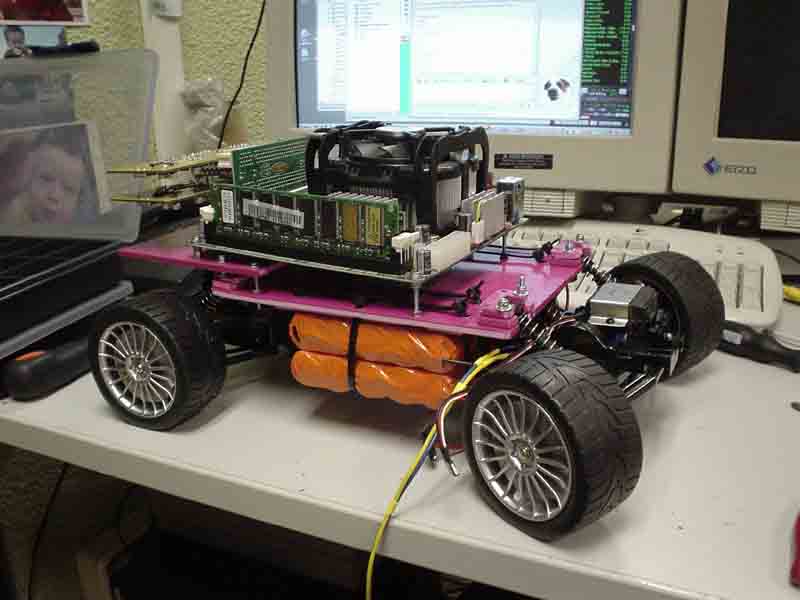
Nos podemos fijar en la direccion a las cuatro ruedas, la idea es, tener direccion y traccion completamente independientes para cada eje, esto, espero que de mejores resultados en cierto terrenos en los que el XPLOR V1 se quedaba "tieso", el poder repartir la traccion del modo que nos insterese es muy importante, asi como decidir la direccion de cada eje.
Espero sacar algo de tiempo pronto y montar de una vez las camaras, y dejar el coche por mi casa en plan "pruebas".
Si alguien tiene interes en esto, que me escriba a xol@xolmatic.com
Abril 2006 - Xol.