![]()
X-Plor V1 - Vehículo de exploración con visión stereo.
La idea de este "viniculo" es la de poder "explorar" zonas con percepcion de relieve o vision estereoscopica, usando unas gafas de VR, las i-glasses, con tracker de posicion de cabeza, con el gobernaremos los dos servos que moveran las camaras, pan y tilt, asi como un voltante de juegos, un LogiTech WingMan con ForceFeedBack para conducir el coche.
En otras palabras te sientas en una silla deltante del ordena, con el volante y pedales mueves el coche como un coche normal, aceleras, frenas, giras....derrapas! xD, enciendes la luces, etc... y con las i-glasses visionas lo que las dos camaras captan con la libertad de mover la cabeza y que las camaras te siguan, con ello se consigue una sensacion de inmersion aceptable. Aceptable solo ya que las i-glasses solo abren unos 55º de campo y con una resolucion por ojo de 1/2 de PAL y otros problemas que no vienen al caso.
La idea viene de inspeccionar sitios remotamente, conductos de aire o cosas asi, incluso en ambiente peligrosos, un dia viendo el equipo que tienen los artificieros para las bombas....joder! que codroño de chisme! me dije yo. La imagen 3D, el stereo al poder!!! el guardia civil mirando un monitor, jugandose la vida de la gente usando una imagen 2D sin profundidad....en fin, ya se me ha ido la pinza! Bueno, que me dio el punto y me lie la manta a la cabeza....y lie a mi colega Sergio....jejeje Somos unos pirados!
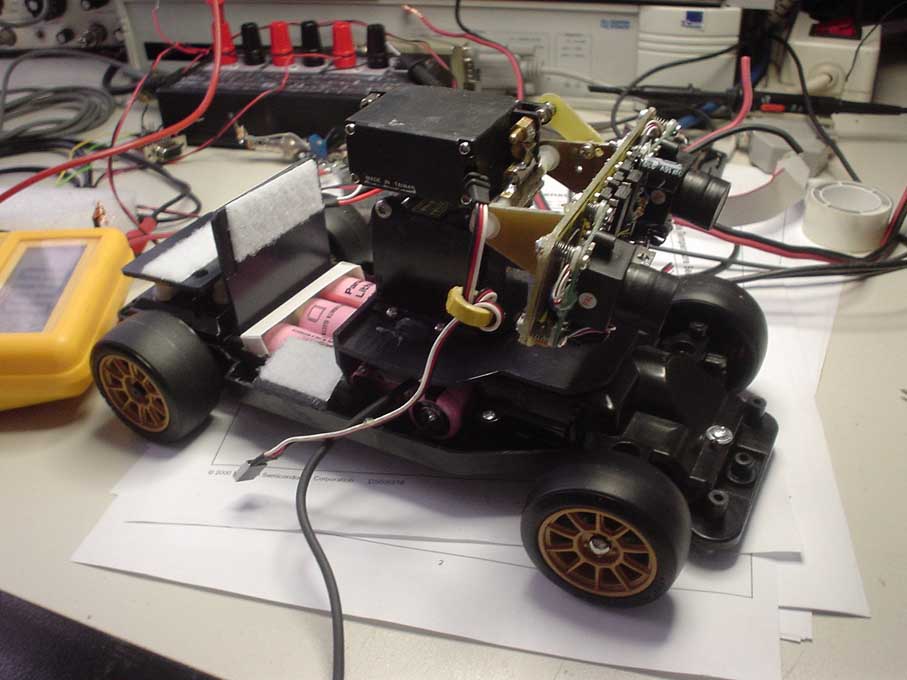
Aqui empezamos a desmontar el Subaru del "Alcampo" del que usaremos el chasis, quitandole todas las "tripas" que sobran, solo dejaremos el motor trasero y todos los plasticos, tapas, etc..
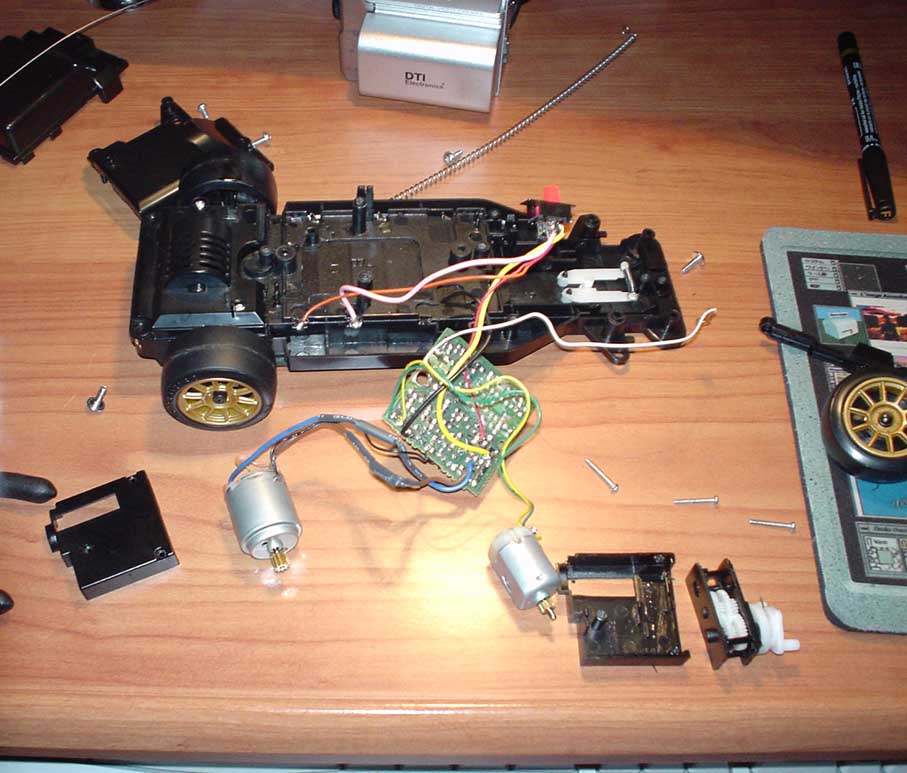
Este es el aspecto que presenta, despues de quitar todo lo que no vamos a usar, es simple.

Detalle de cerca del acabado, la ruedas son de goma, mas o menos blanda, no estan mal de agarre.

Lo primero que meteremos es un servo de RC en la direccion, aqui el ingenio de cada uno, lima, pegamento...
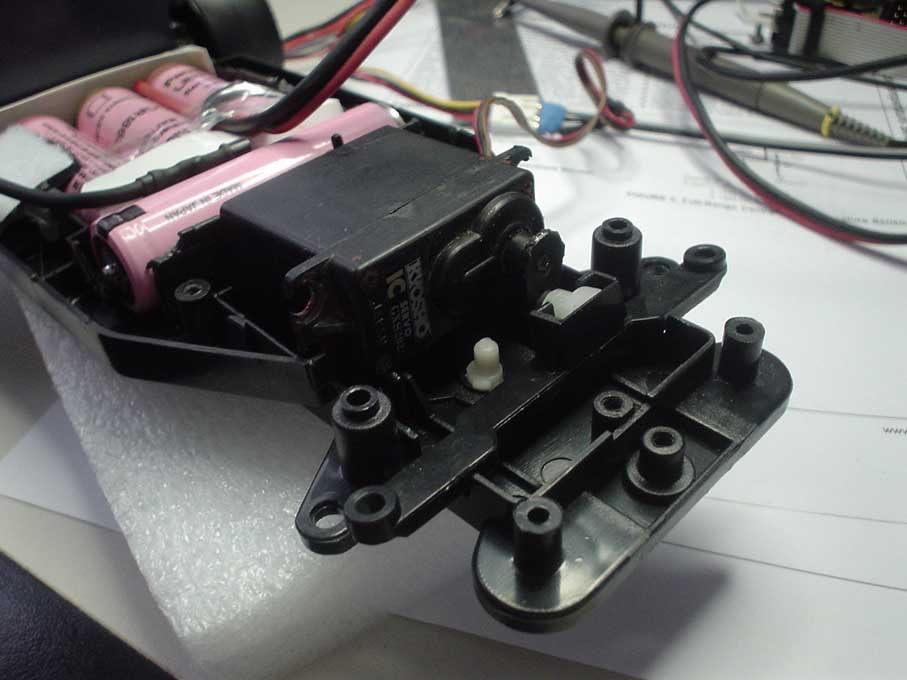
La vida del coche, las baterias, de Litio, de 1850mA/h.

Con un poco de maña las metemos en el anterior portapilas, fijaos en el detalle de meter un sensor de temperatura a una de ellas, la idea es monitorizar la temperatura, para carga y para posibles problemas (cortos....).

Bancada para los servos de las camaras, el velcro ayuda mucho en los prototipos.
Otra vista de lo mismo.
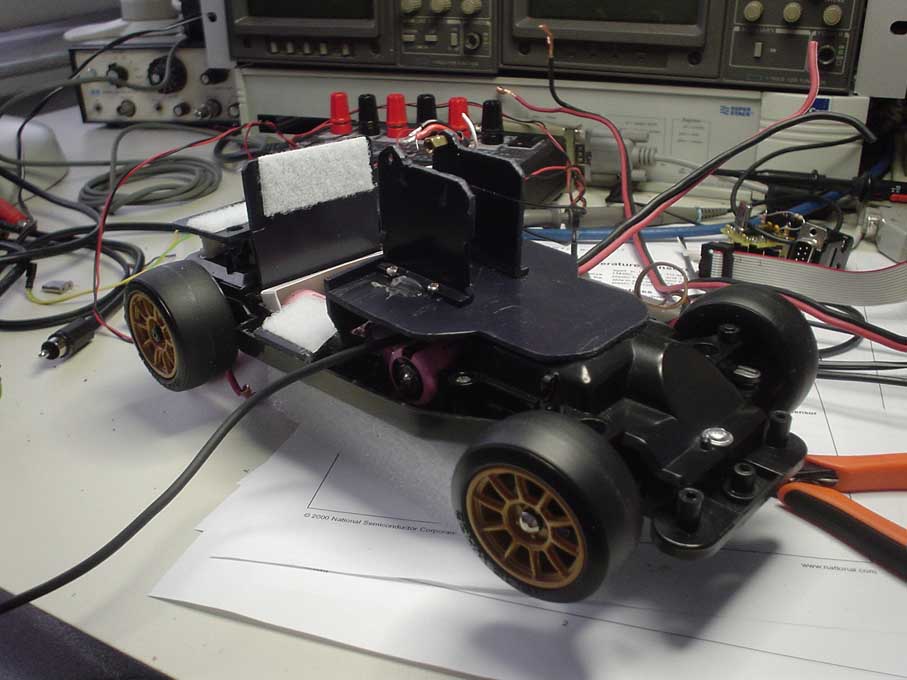
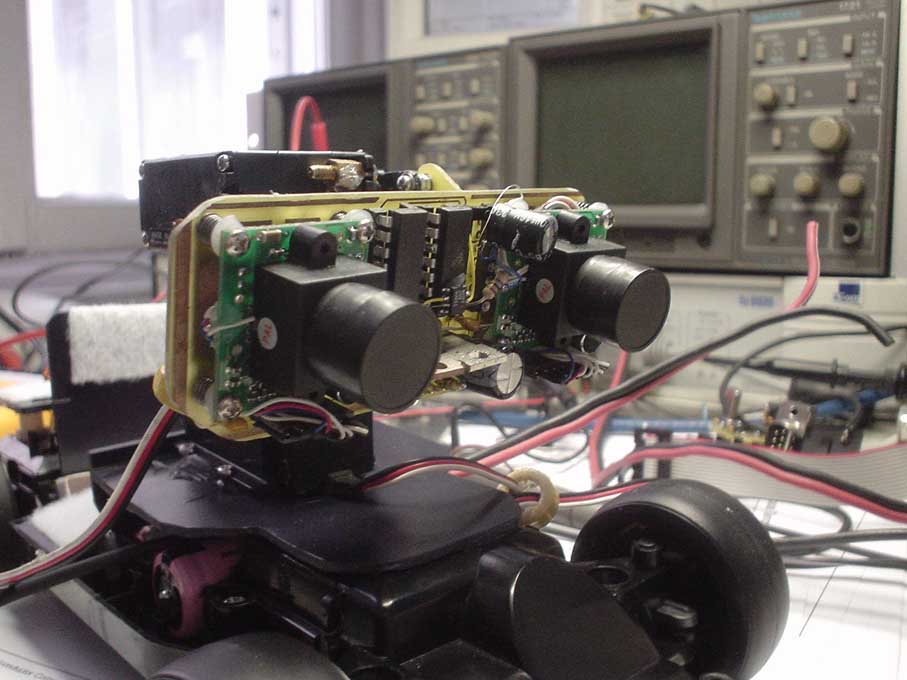
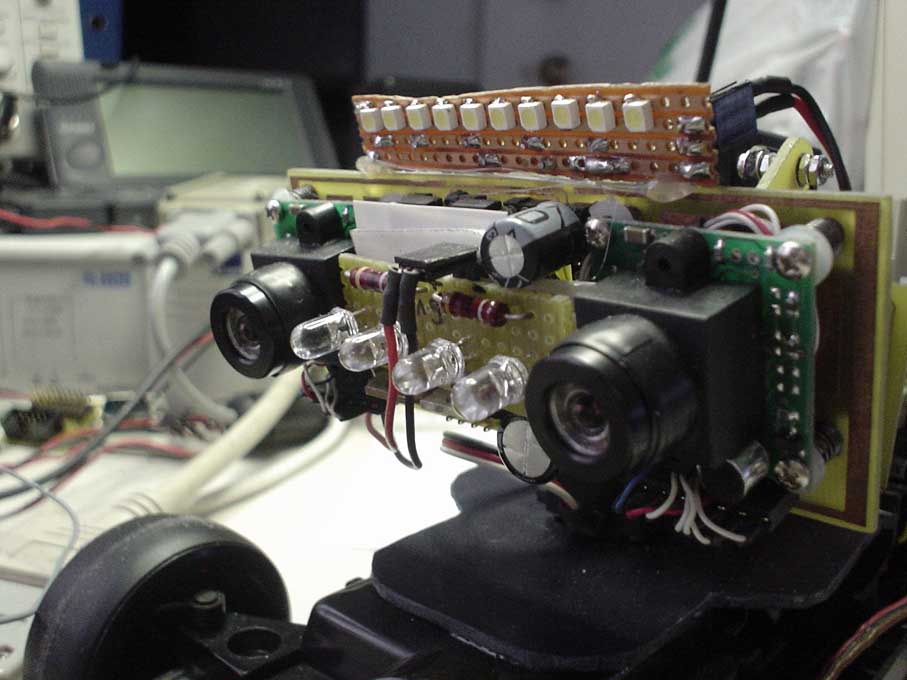
Aqui vemos como ya tenemos los servos para los movimientos de las camaras (pan y tilt), asi como las camaras ubicadas en su posicion final.
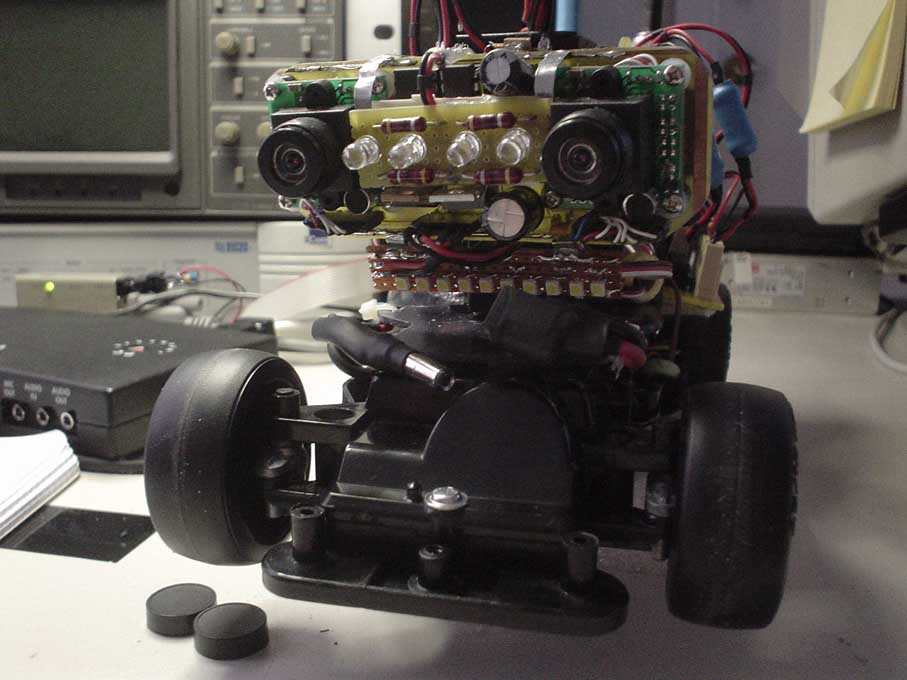
La vista frontal de esto mismo, fijaos en la placa de las camaras, he "apañao" un soporte elastico para las dos camaras, a base de muelles y tornillos con tuerca autoblocante para asi poder ajustar la convergencia de las dos camaras, de no ser asi, no habra quien fusione las dos imagenes en el cerebro. Toda la electronica que hay en la placa de las camaras es para sincronizarlas entre si y para entrelazarlas usando un campo de cada una de las imagenes de las camaras, en otras palabras, uso el campo impar de la camara izquierda y el campo par de la camara derecha, con ello obtengo un señal de compuesto, por campos, en la que en cada campo hay una camara, esto sera desentrelazado y cada campo llevado a las TFT´s de las i-glasses.
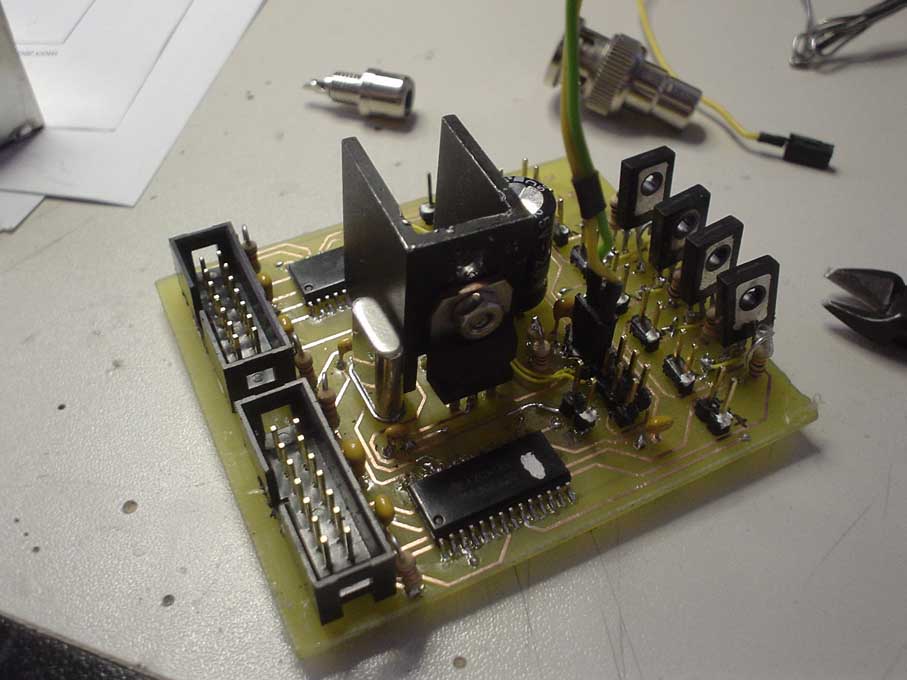
He aqui el primer prototipo de la electronica de control, como siempre, Texas Instruments, MSP430 family!
El lugar de trabajo... un desastre!
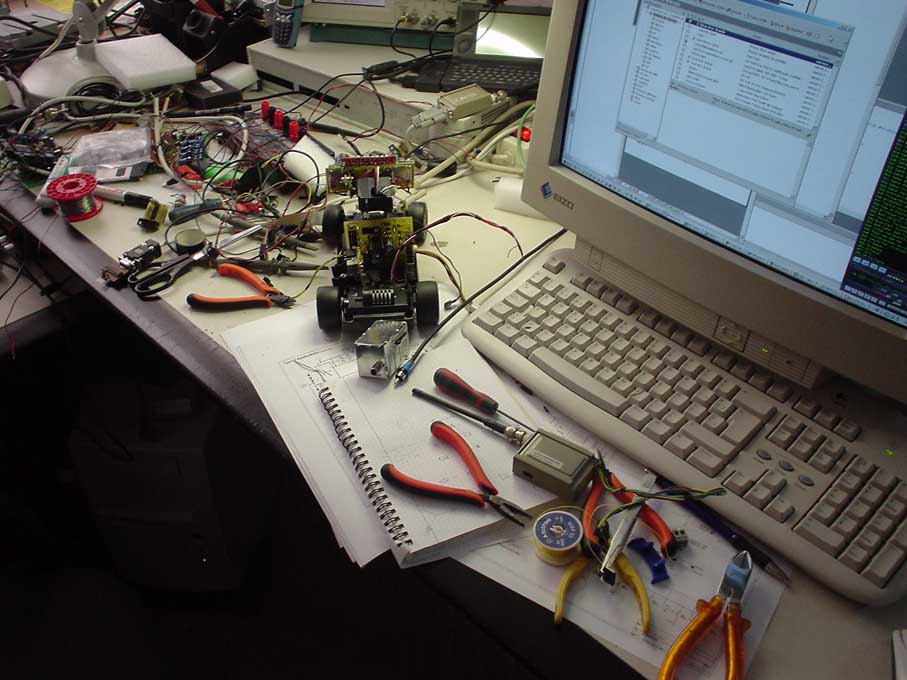
Vamos integrando la placa de control en el coche, en breve se movera!
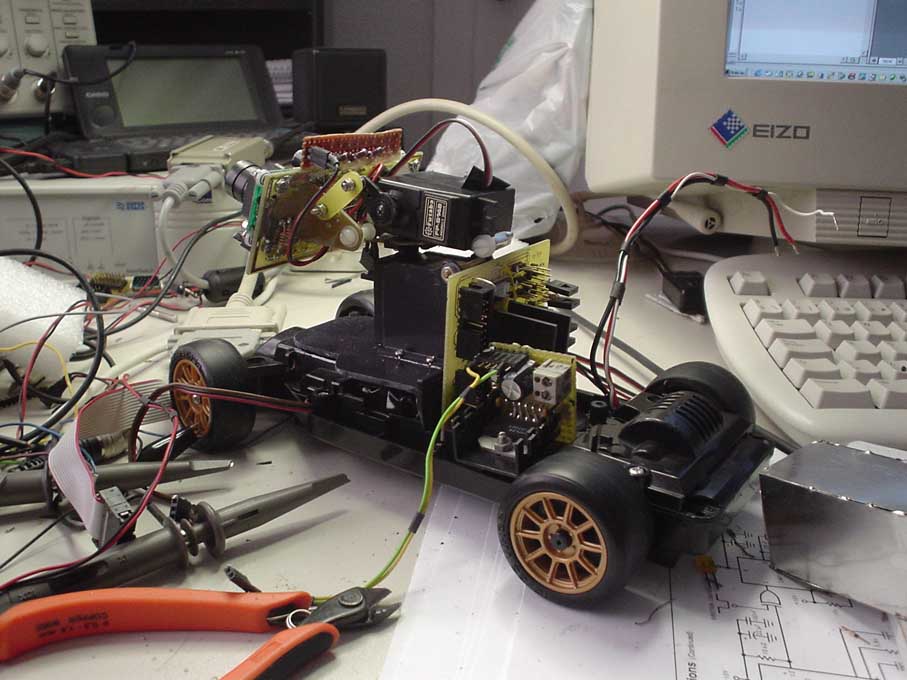
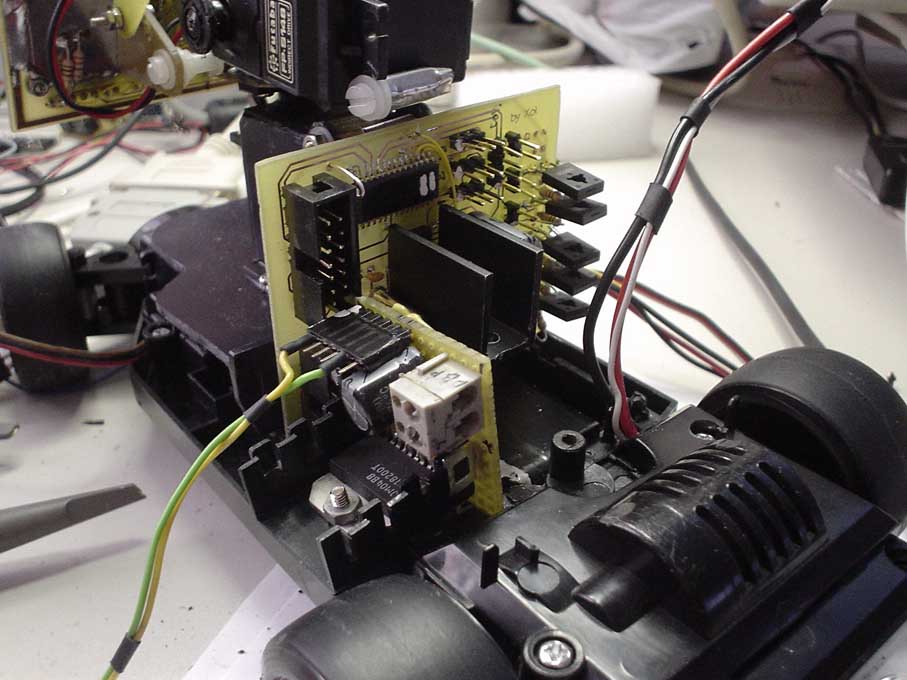
Detalle de la placa de control con la parte de potencia del motor de propulsion. LMD18200 al canto.
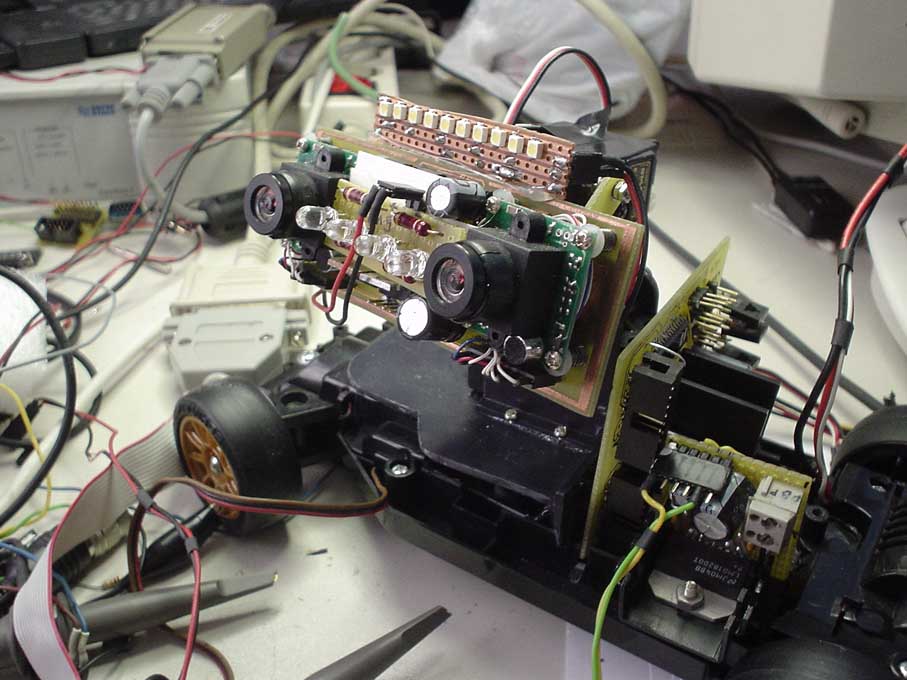
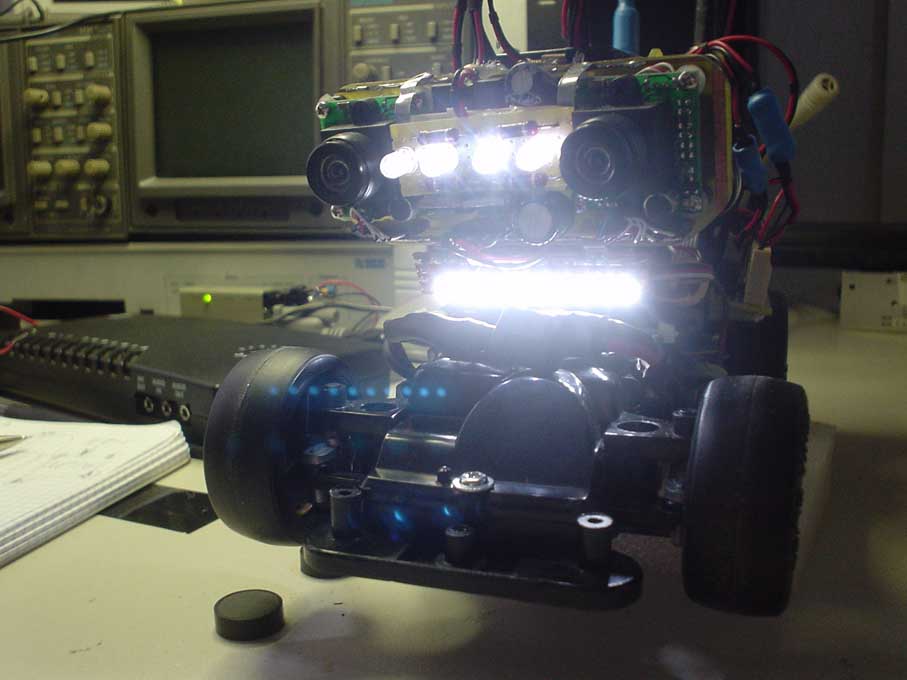
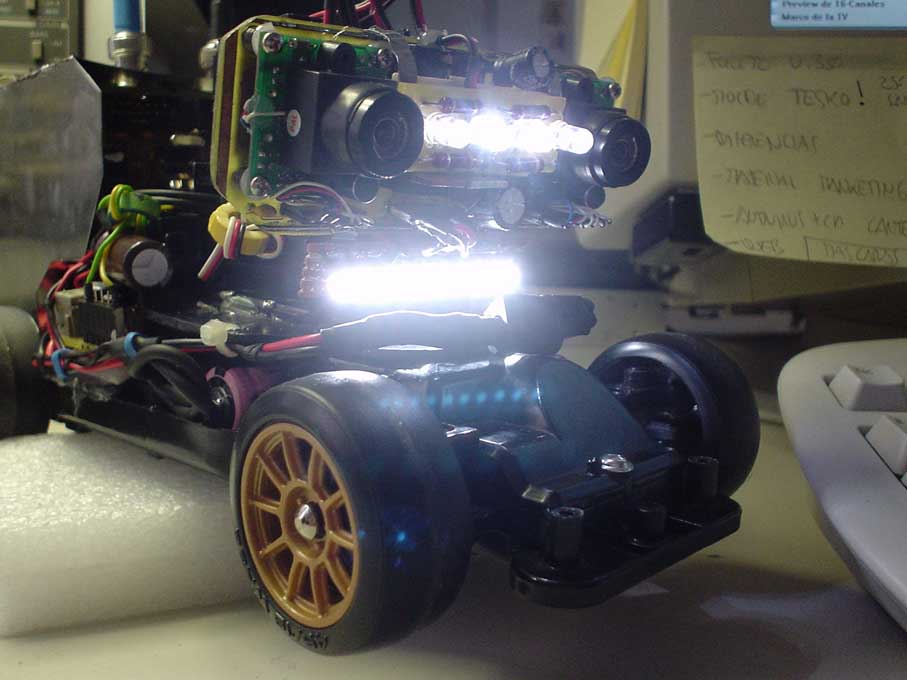
Esto ya se mueve, ademas he añadido unos leds blancos, unos para relleno y otros para larga distancia.
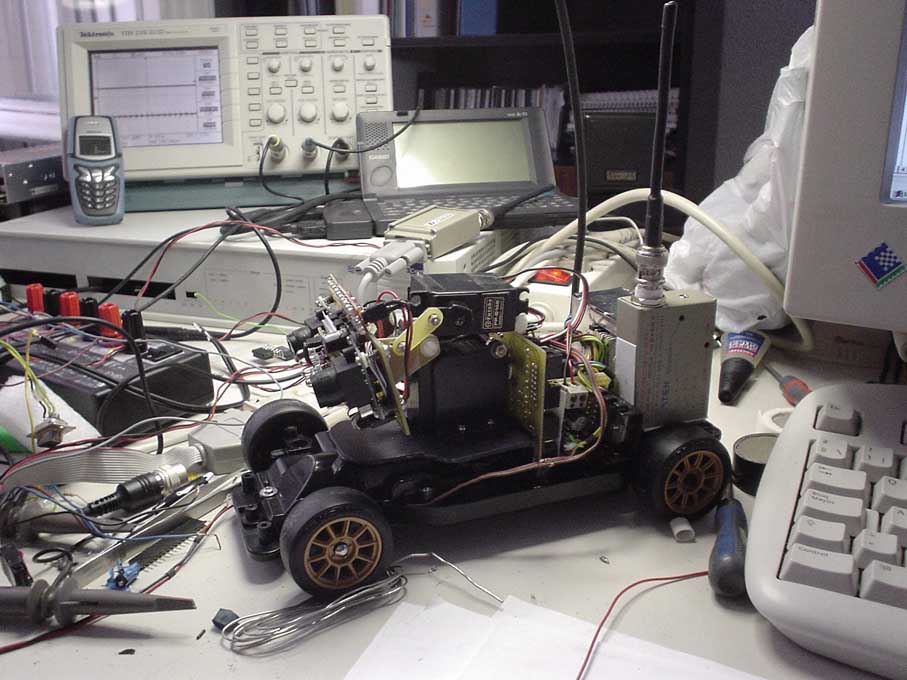
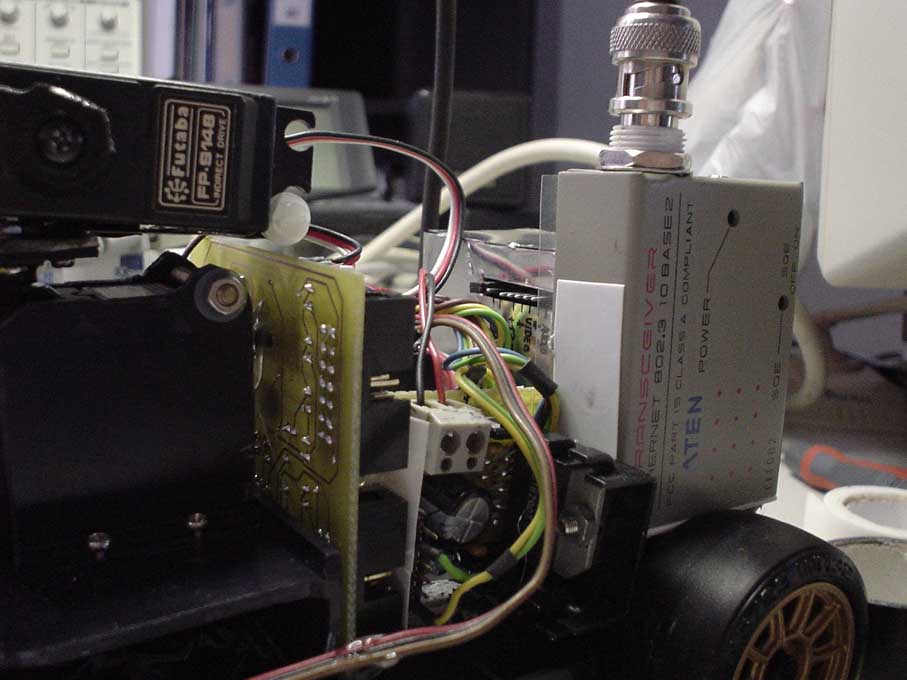
Ya he metido la parte de RF, el transmisor de datos a 38400bps y el de video en VHF, canal 12.
Detalle de la placa de camaras, con los leds.
Detalle del transmisor de datos, usando una caja de viejo adaptador de ethernet BNC a DB15...de donde he sacado esto?
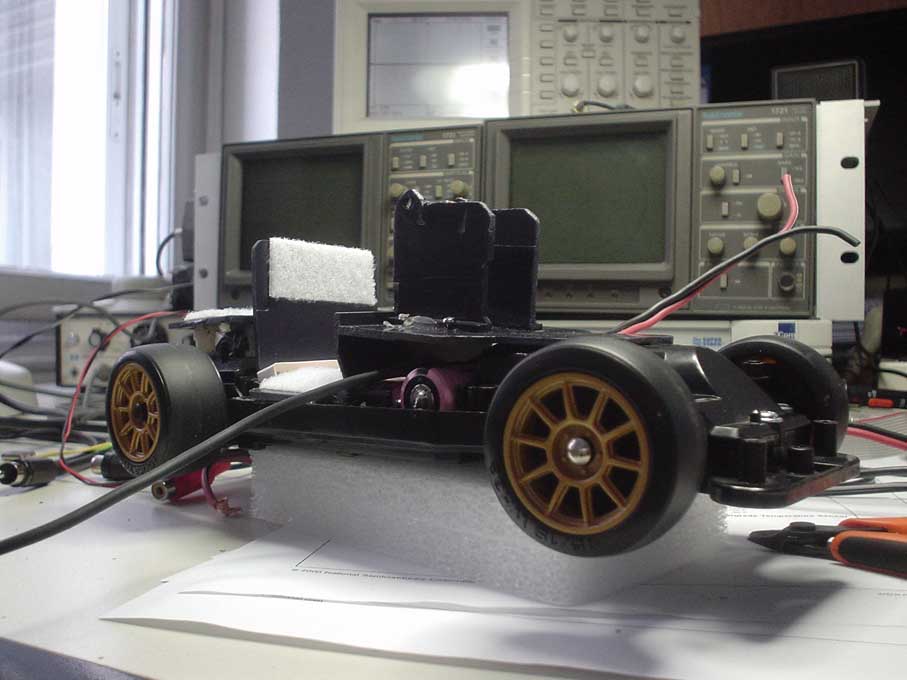
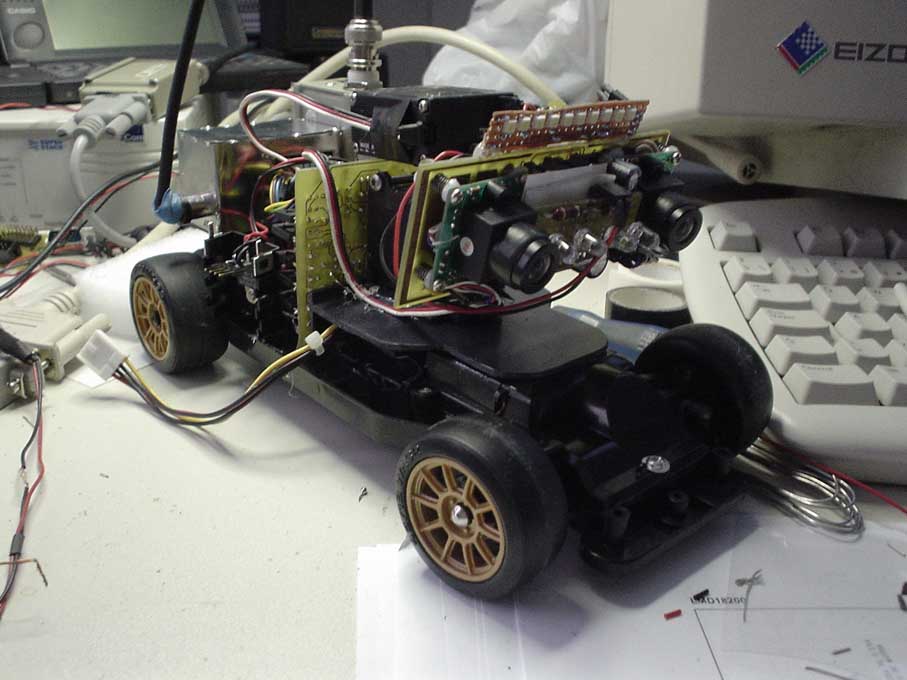
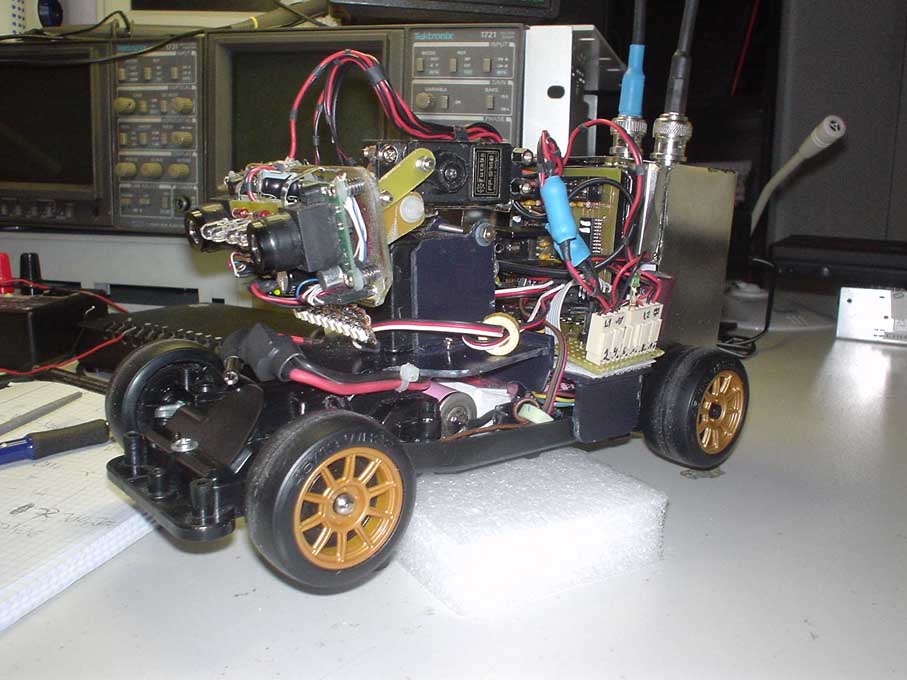
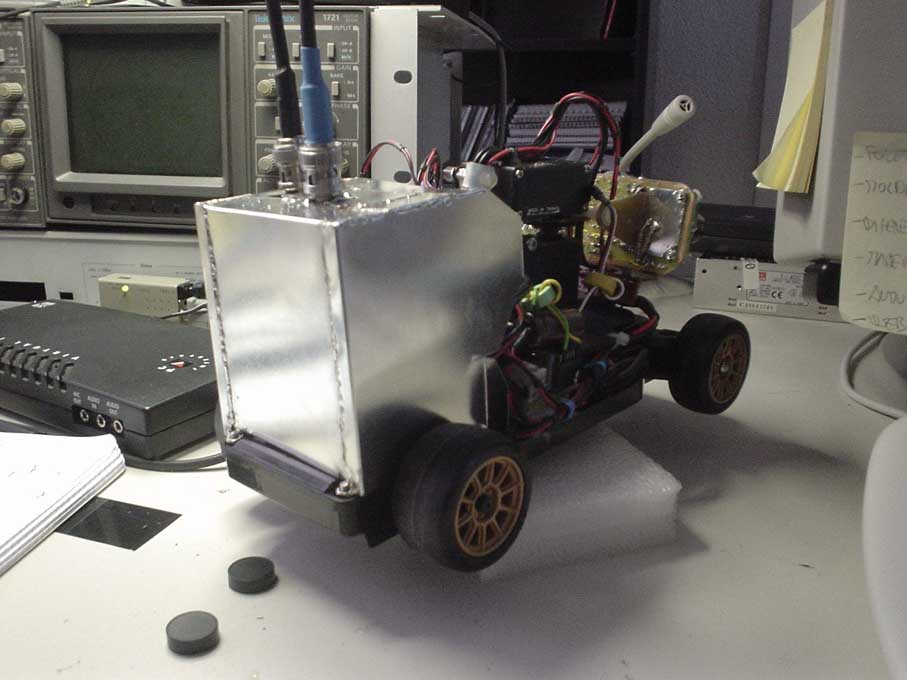
Aqui el coche en posicion de salir zumbando!
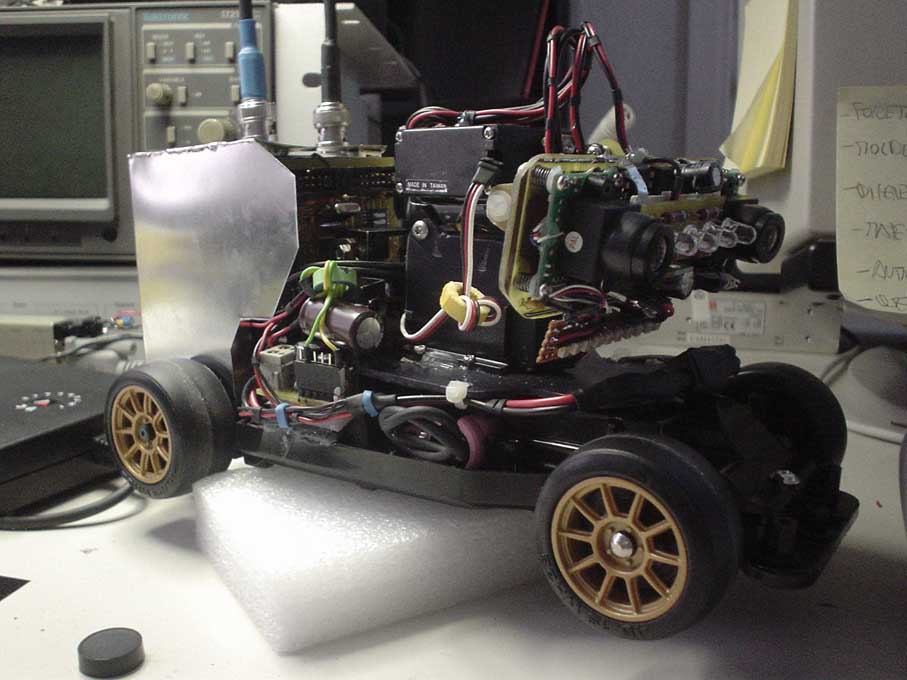
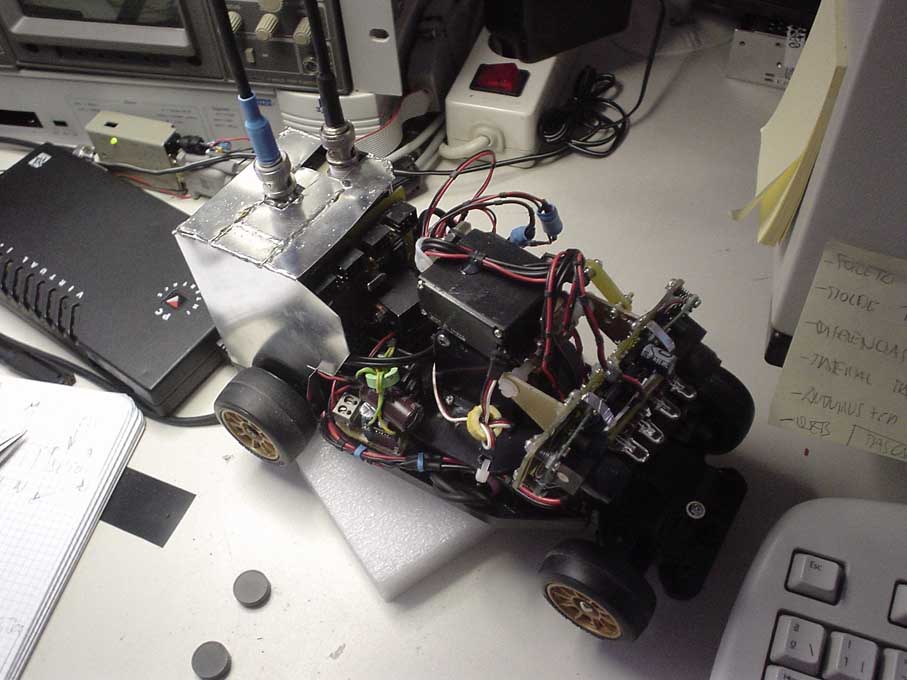
Vista desde arriba en la que podemos ver mas detalles del transmisor de video y audio, al final lo he blindado con chapa de acero estañado, para evitar follones de RF. De momento es estable, aunque se calienta un pelin.
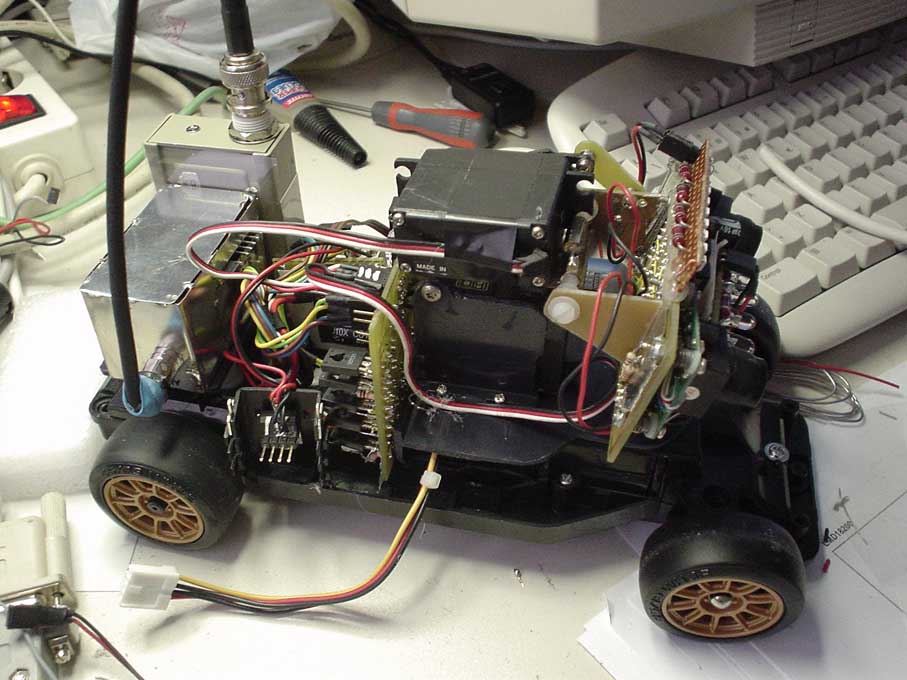
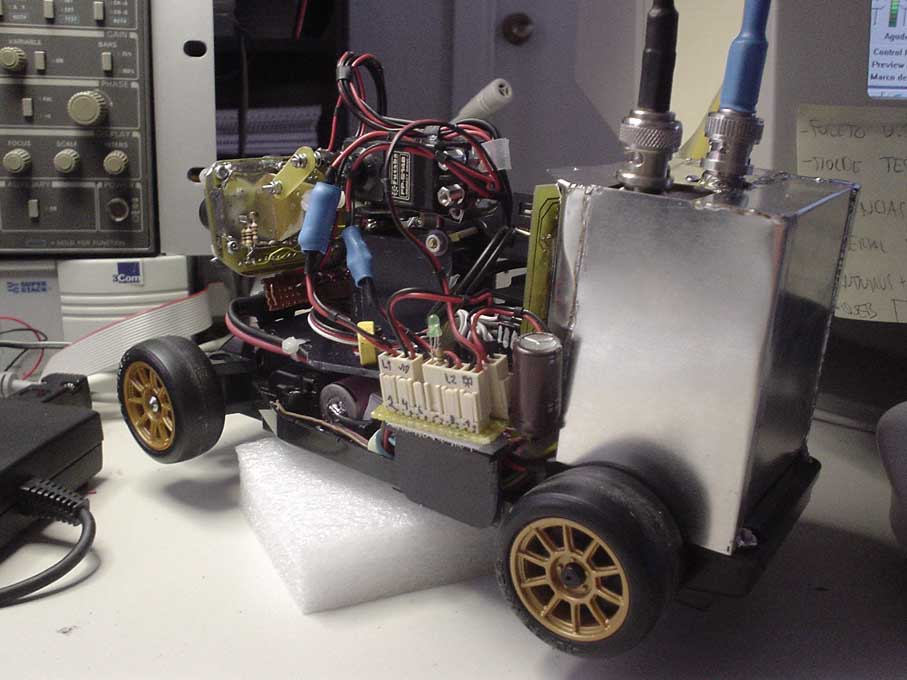
Lateral en el que podemos observar la placa de control de los leds y transmisores. Con ella podemos enceder y apagar los leds, asi como decidir la potencia de salida del amplificador lineal de VHF que uso.
La imagen, el rostro de...
Con los leds a tope! Al final he cambiado la ubicacion de los leds de relleno, ahora abajo, para iluminar el suelo un poco mejor, conclusion a la que he llegado despues de darle unas cuantas ostias al coche, claro. xD
Otra vista, he añadido mas plano de tierra para bajar un poco las estacionarias que estaban disparadas!
Me gustaaaa....
Mas detalles "aereos".
Mas detalles, mas blindaje.
Mas de lo mismo, pero hay veces, que para otros, resulta interesante ver como se ha solucionado un asunto u otro...
Aqui el chisme terminado en version proto total, pero 100% funcional, asi como el soft de control desde el PC.
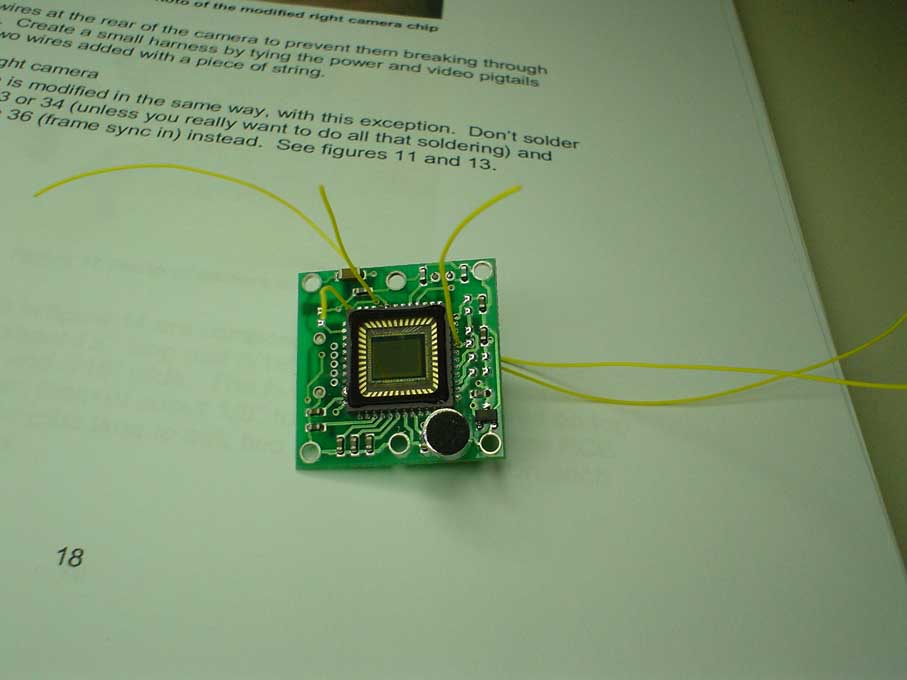
Ahora veremos las camaras que he usado antes y durante el destripe!

Aqui poca electronica periferica hay, todo esta en el mismo CCD.
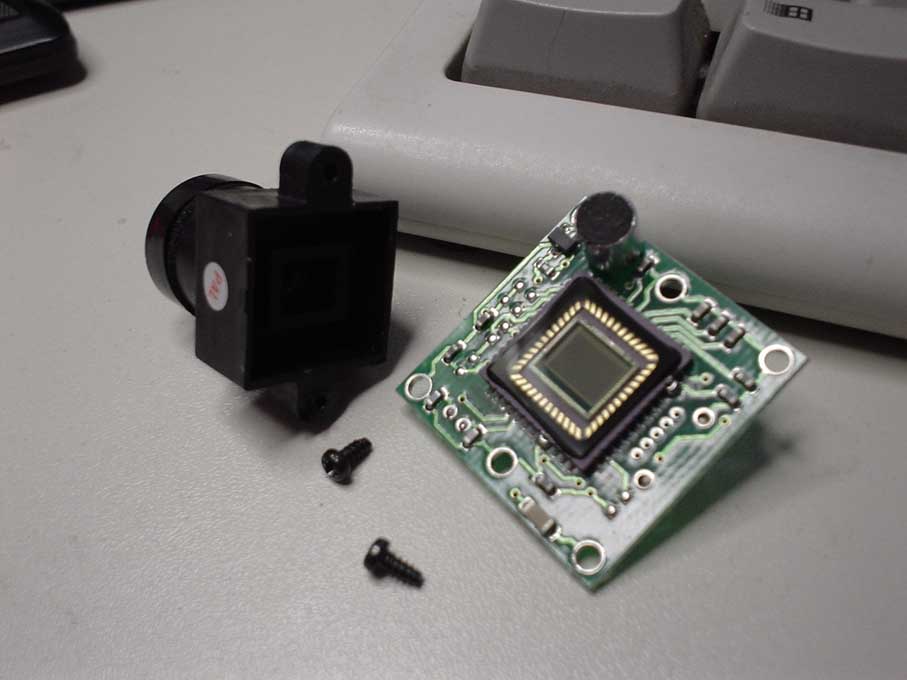
El mismo CCD contiene todo lo necesario, para que, como "casi" un cuarzo y poco mas, saque compuesto en color.
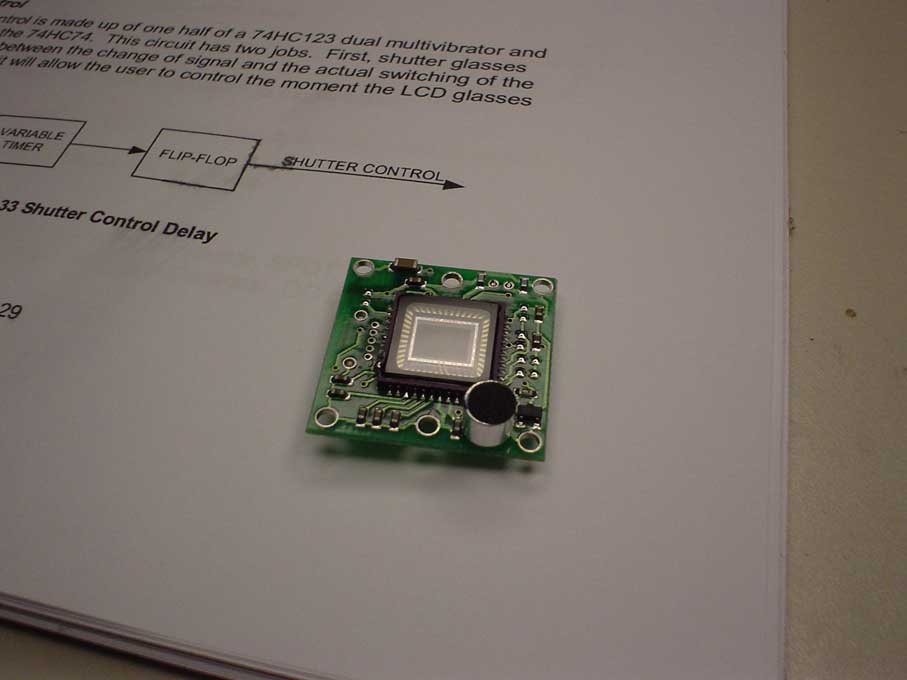
Como veis, es mas simple que el mecanismo de un chupete.
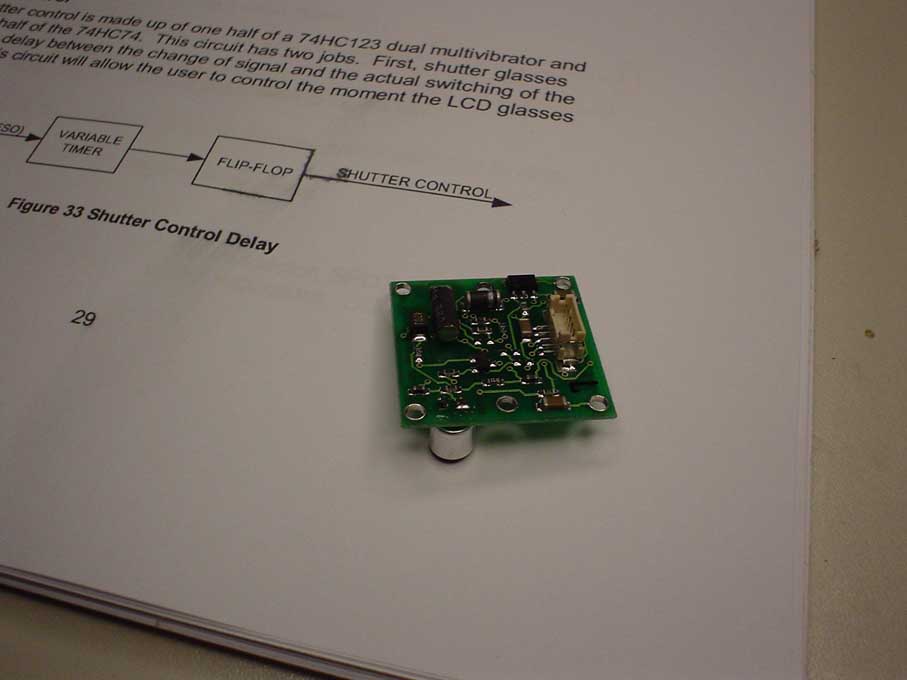
Procedemos a cablearla, la idea es que una de las dos genere el sincro para las dos y una de ellas esclavizarlas a la otra, asu vez comparten el mismo oscilador patron de manera que sea sencillo el sincronizarlas. Solo tenemos que desconectar la entrada de sincro y usar la salida de clock de la otra camara como oscilador patron, todo esto es teorico, el video no es una puerta NAND, es analogica pura y con breves desfases pierdes el color, etc.... Hacen falta medios para hacerlo bien.
Si algun dia, planificase mis "inventos" igual podria generar documentacion decente no estas cuatro fotos y tres frases. En cualquier caso, espero que esto le sirva a alguien.
Si alguien tiene interes en esto, que me escriba a xol@xolmatic.com
Nov 2003 - Xol.